Andika Nugraha
Computer Engineering
Saya adalah mahasiswa Teknik Komputer yang berfokus pada pengembangan sistem embedded, Internet of Things (IoT), serta pemrograman mikrokontroler. Berpengalaman dalam membangun berbagai proyek berbasis ESP32, Arduino, dan STM32, mulai dari sistem otomatisasi, sensor monitoring, hingga integrasi jaringan seperti WiFi, MQTT, dan Mesh Network. Saya juga aktif mengembangkan aplikasi Android untuk kebutuhan IoT agar perangkat dapat dikontrol dan dipantau secara real-time.
Kunjungi GitHub Saya
💻 Portfolio Projects
Kumpulan proyek berbasis sistem/IoT yang telah saya kerjakan.
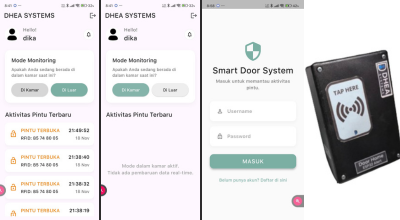
Smart Door Lock
Sistem kunci pintu cerdas berbasis mikrokontroler dengan autentikasi RFID dan aplikasi mobile. Dilengkapi fitur monitoring status pintu, pencatatan log akses, dan kontrol jarak jauh untuk meningkatkan keamanan rumah atau kantor.
Lihat di GitHub →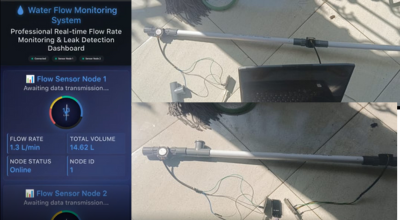
Waterflow Monitoring System
Sistem IoT untuk memantau debit air secara real-time, mendeteksi potensi kebocoran dari selisih aliran, dan mengirimkan notifikasi peringatan. Dibangun menggunakan ESP32, sensor YF-S201, serta dashboard monitoring online.
Lihat di GitHub →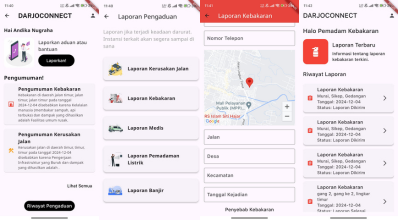
Darjo Conect
Aplikasi pengaduan masyarakat Kabupaten Sidoarjo yang memungkinkan warga mengirim laporan secara langsung ke instansi terkait. Setiap kategori (kebakaran, PLN, jalan rusak, dan lainnya) memiliki admin khusus sehingga penanganan laporan menjadi lebih cepat, terstruktur, dan transparan.
Lihat di GitHub →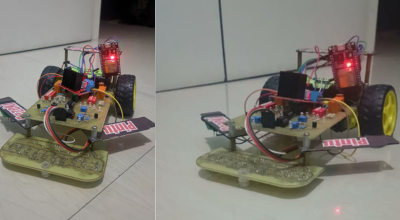
Mobile Robot Remote
Sistem kendali robot bergerak menggunakan ESP32 dan controller PS3. Mendukung kontrol kecepatan, arah, dan manuver kompleks secara responsif melalui komunikasi Bluetooth HID, cocok untuk robot edukasi maupun robot riset.
Lihat di GitHub →🛠️ Hardware Projects
Beberapa karya fisik yang melibatkan perancangan dan implementasi elektronika.

Power Supply 9 Volt
Perancangan catu daya teregulasi 9V yang stabil dan low-noise, cocok untuk kebutuhan eksperimen elektronika dan rangkaian sensitif.
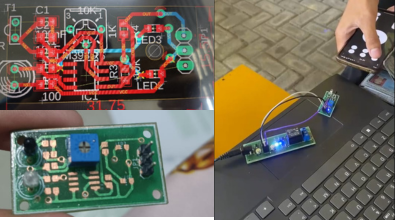
Infrared Sensor Module
Modul sensor inframerah untuk deteksi objek dan pembacaan warna dasar. Dirancang dengan sensitivitas tinggi dan respon cepat, ideal untuk robotik dan sistem otomatisasi.
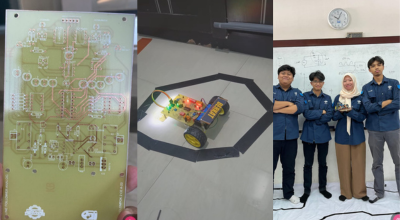
Line Tracer Analog
Robot penjejak garis berbasis rangkaian analog tanpa mikrokontroler. Menggunakan sensor optik dan rangkaian komparator sehingga respons robot sangat cepat dan efisien.
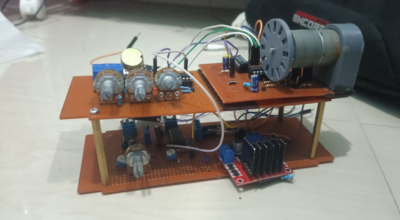
PID Control Motor Driver
Driver motor dengan implementasi algoritma PID untuk mengontrol kecepatan dan posisi motor secara presisi. Cocok untuk proyek robotik, otomasi, atau sistem yang membutuhkan kestabilan pergerakan.